
Home
RObot enhanced SenSing, INtelligence
and actuation to Improve job quality in manufacturing.
RObot enhanced SenSing, INtelligence and actuation to Improve job quality in manufacturing
The ROSSINI project
a disruptive, inherently safe hardware-software platform for the design and deployment of human-robot collaboration (HRC) applications in manufacturing.
8 MLN EU Contribution
42 Months Duration
13 Partners
7 Countries
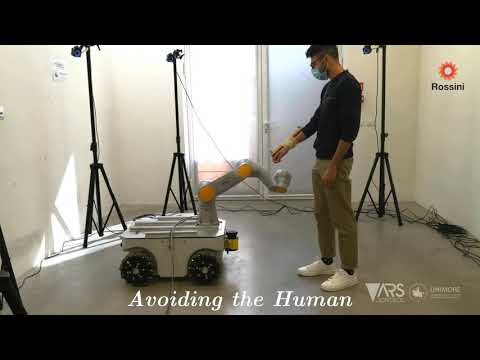
Video
How will Rossini project improve job quality in manufacturing? Which are the tools it proposes to enable human robot collaboration?
Youtube Channel
Youtube





The Rossini Platform
Integrate all the ROSSINI technological components into one inherently safe platform for HRC applications development.
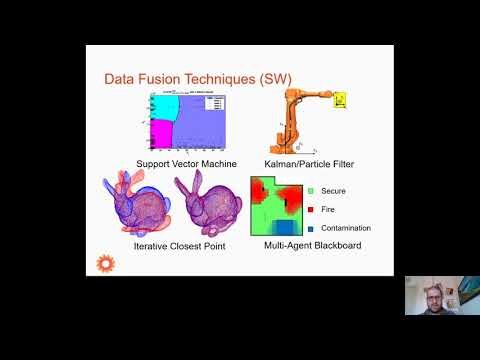
Sensing

Design a Smart and Safe Sensing System with improved detection and tracking capabilities for monitoring the working environment, and a safety-graded fusion module for the processing of data
Actuation

Develop a “Collaborative by Birth” Robotic Arm range with novel built-in safety features
Control

Develop a Safety Aware Control Architecture for robot cognitive perception and optimal task planning and execution
Human Factors

Develop a framework for Human-Robot Mutual Understanding in collaborative operations